Highlights
These researchers created a robotic jaw model to test a medicated chewing gum drug-delivery system. The robotic model needed to mechanically chew gum in a way that approximated human chewing. They first created digital 3D models of the skull. The robotic model was compared to human chewing and the results showed little significant difference between the chewing robot and the human subjects.
What’s your favorite flavor of chewing gum? In modern times, we have dozens to choose from: bubble gum, cinnamon, and all kinds of mint. But what about pine, spruce, or
chicle?
These are some of the first flavors of gum that have been chewed for thousands of years. Chewing can stave off thirst or hunger, and it can also have medicinal properties. What is known today as chewing gum comes from the Mayans and Aztecs in Central America, who used the sap of the sapodilla tree to create chicle, which was the material that made William Wrigley into a successful entrepreneur.
Today you may chew gum to clean your teeth, to freshen your breath, to help you concentrate, or to stave off boredom. There might be another reason to chew gum over the next decade: as a new way to take your medicine. Clinicians and researchers have long recognized the advantages of medicated chewing gum. For example, medicine that is chewed can be absorbed by the oral membranes in your mouth and avoid the digestive tract, where it is less stable, less soluble and bioavailable, and less easily absorbed across intestinal membranes. Another advantage is that chewed medicine is much easier for children to take compared to pills or injections. Until now, there has been little progress on the development of medicated chewing gum because it has been difficult to test its effectiveness in the laboratory.
Recently, researchers at the University of Bristol in the United Kingdom have developed a robotic system to test medicated chewing gum. These researchers have shown that the humanoid chewing robot they created can chew gum in a way similar to humans. This creation by Dr. Kazem Alemzadeh, Senior Lecturer in the Department of Mechanical Engineering, in collaboration with Dr. Nicola West, Professor of Restorative Dentistry, has the potential to catalyze the development of medicinal chewing gum and revolutionize how we take medicine.
How Humans Chew
To better understand this research, let’s start with the basics of human chewing. Indeed, gum would have little use without humans’ impressive ability to chew. The structures involved in chewing include the mouth, lips, tongue, teeth, upper jaw, and lower jaw.
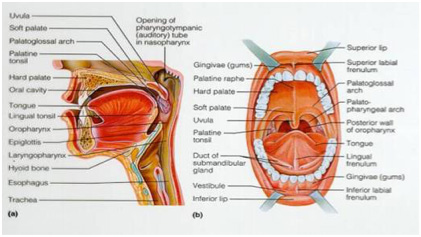
Figure 1. Facial structures involved in chewing
[Source: https://nutritionforthemodernstudent.wordpress.com/anatomy-and-physiology-of-the-digestive-system/]
They are held together by several bones and muscles that make up the
temporomandibular joint
or TMJ. If you press on the area right below your ears and bite down, you can feel the TMJ working.
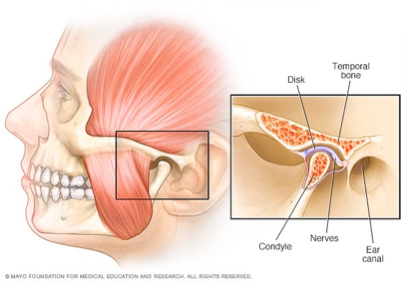
Figure 2. Temporomandibular joint
[Source: https://www.mayoclinic.org/diseases-conditions/tmj/symptoms-causes/syc-20350941]
The largest muscle in the TMJ complex, the masseter, is the strongest muscle by weight in the human body. The full power of the adult masseter muscle can unleash up to 200 pounds of force on the back molars.
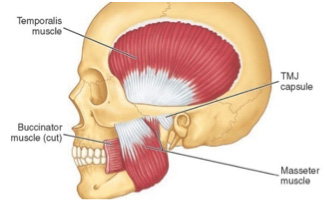
Figure 3. Chewing muscles, including the masseter muscle
[Source: http://www.nhimassageblog.com/2015/10/15/the-masseter/]
Chewing is not just about chomping, though. Once your adult teeth come in, those are the only teeth you have. The chewing muscles are able to protect the teeth by knowing exactly when and where to apply force, and when and where to be gentler. As you have probably noticed, your mouth is extremely sensitive. Your teeth can detect a grain of sand that’s only 10 microns in diameter. For comparison, a human hair is about 75 microns in diameter. Those are pretty
sensitive teeth!
Let’s observe what happens as you eat a bite of cracker. In your mouth, the teeth chew the cracker by biting roughly 20-40 times. The TMJ allows for movement in six different directions of motion: up and down, front to back, and side to side. These motions are involved in three distinct types of chewing movements: crushing, shearing, and grinding. These movements allow the cracker to be properly chewed. Shearing is a vertical motion where the top and bottom teeth slide up and down against each other. Crushing is a straight up and down motion. Grinding is a horizontal motion where the tops of the upper and lower teeth slide against each other side to side.
As the teeth are shearing, crushing, and grinding the cracker, the food is mixed with saliva released from salivary glands in the mouth. The food and saliva mixture forms a soft ball, known as a
bolus.
The tongue and the muscles of the mouth and cheeks turn the bolus and move it around the mouth so that it is properly chewed on all sides. Only when the bolus has been sufficiently chewed is it pushed to the back of the mouth for swallowing.
Reverse Engineering the Human Jaw
In order to create a system to test chewing gum, Dr. Alemzadeh and his team needed to build a robotic model that would mechanically chew gum in a way that approximated human chewing. This is not the first time that Dr. Alemzadeh has built a robotic jaw. In 2008, Dr. Alemzadeh worked with colleagues at the dental school at the University of Bristol to develop a model for testing dental materials used for implants and crowns. This material is very important—and expensive—and the clinicians at the dental school wanted a way to test different materials to know which were stronger.
To create this first robotic jaw, Dr. Alemzadeh spent many hours observing humans chewing so that he could recreate similar movements in the laboratory. This process of creating products that mimic natural functions is called reverse engineering. The result was a model called the
Dento-Munch chewing robot,
which was presented at the Royal Society in 2009.
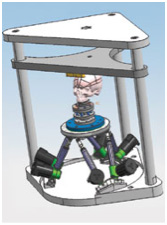
Figure 4. Dental robotic testing simulator called Dento-Munch engineered by Dr. Kazem Alemzadeh
[Source: https://www.bristol.ac.uk/news/2008/212017945379.html]
The Dento-Munch was designed to test dental material, and it was capable of moving in six directions, just like the human jaw. Although it was created to simulate some motion of the jaw, it was an open system with no tongue, cheeks, or saliva, so it could not be used to test medicinal gum. This is because, as we have just seen, there’s a lot more involved in actually chewing than simply moving the jaw up and down. Try chewing a bite of cracker without moving your tongue or cheeks, rotating your jaw, or using saliva – it doesn’t work very well.
A Jaw that Chews Gum
To create a robotic jaw that was capable of chewing gum, Dr. Alemzadeh teamed up with Dr. Nicola West, Professor of Restorative Dentistry at the University of Bristol. Dr. West was interested in developing a chewing robot that could be used to test medicinal gum.
The scientists were aided by using computer technology that allowed them to first create digital 3D models of the skull.
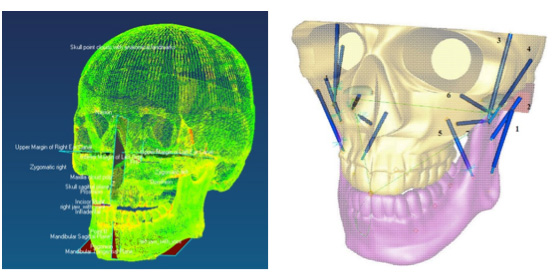
Figure 5. 3D digital models of the skull
[Source: Images courtesy of Dr. Kazem Alemzadeh]
Using these models, Dr. Alemzadeh identified the key areas of the skull that needed to be replicated in the robotic chewing model. This information was used to create a computer simulation of the working skull, taking into account jaw alignment, movements, and forces. Once the digital model had been optimized, it was time to start building.
The main part of the robotic chewing model is the jaw-like simulator with a removable chewing chamber. The modified skull mimics the function of the temporomandibular joint using springs and a chain and cam system.
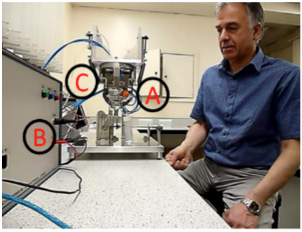
Figure 6. Dr. Alemzadeh with humanoid chewing robot and artificial oral environment consisting of A) the custom-built simulator, B) the custom-built control box, and C) the calibrated water bath.
[Source: Image courtesy of Dr. Kazem Alemzadeh]
The system is controlled by a mechanical crank that functions similarly to a bicycle. The crank is turned manually to produce the chewing motion. It is calibrated to produce one cycle per second, which is about one chew per second or 60 chews per minute, like the human chewing cycle. This is the chewing rate that has been used in other models.
Inside the modified skull sits the removable chewing chamber. The outside of the chamber is composed of silicone “cheeks” that prevent saliva and chewing gum from leaking out of the chamber. The chamber contains a full set of replica teeth. Three of the teeth have holes in them to allow for air pulses and artificial saliva to enter the chamber. Air pulses mimic the function of the tongue that flips and tumbles the gum as it is being chewed. The artificial saliva takes the place of human saliva, which functions to moisten the bolus and prepare it for swallowing. The rate of saliva delivery has been carefully calibrated in prior experiments based on human saliva production.
There are two other parts to the chewing model: a control box and a water bath. The custom control box controls the release of air pulses and saliva into the chewing chamber. The water bath regulates the temperature of the chewing chamber.
Human Chewer vs Chewing Machine
Once the robotic device had been developed, it was time to test it. First, Dr. Alemzadeh performed experiments to test and calibrate the amount of force delivered by the jaw simulator. The simulator can produce up to 500 newtons of chewing force, but that is much more than is necessary for chewing gum. Experiments showed that 200-250 newtons of force were needed to break the shell of Wrigley’s Extra White gum, the gum used for these experiments.
Figure 7. Wrigley’s Extra White chewing gum used in this experiment
[Source: Images courtesy of Dr. Kazem Alemzadeh]
Next, the researchers created an experiment to test how well the chewing robot could chew gum compared with human subjects. The gum was measured before and after each trial. For this experiment, the researchers measured
xylitol,
the active ingredient in chewing gum. The amount of xylitol was measured in the gum prior to chewing and after chewing for 20 minutes by humans and the chewing robot. In addition, samples of artificial saliva (from the robot) and human saliva (from the human subjects) were taken every five minutes over the 20-minute chewing period.
The ten human chewers were all healthy adults with their own natural teeth. The human subjects were trained how to chew the gum and spit saliva samples at the appropriate time so as not to lose saliva to swallowing. Participants were also directed not to consume any products containing xylitol for 24 hours prior to the study. Saliva samples were collected from humans in new sterile test tubes at five-minute intervals.
To mimic the ten human participants, the humanoid chewing robot chewed gum during ten separate trials using ten distinct chewing chambers. The chambers were loaded individually into the simulator, which was operated continuously over the course of the 20 minutes at a steady rate of one chew per second. Artificial saliva was collected through a tube that connected the chewing chamber to an external collection vessel. Between trials, the chewing simulator was cleaned using deionized water and artificial saliva. All saliva samples from both the humans and the robot were frozen until analysis.
Chewing with Human Participants
The results of the experiment showed little significant difference between the chewing robot and the human subjects. After 20 minutes of chewing, there was 2.6% xylitol remaining in the robot-chewed gum and 1.6% xylitol remaining in the human-chewed gum. In saliva collection, the researchers accounted for 64% of xylitol released in human saliva and 50% of xylitol released in artificial saliva. The authors hypothesize that saliva was lost due to evaporation and remaining on teeth and mouth/chewing chamber surfaces.
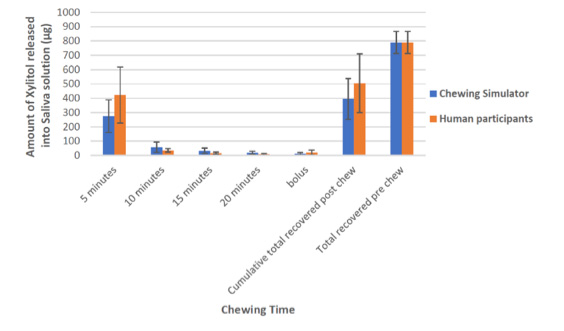
Figure 8. Comparison of the amount of xylitol released into saliva at five-minute intervals by human participants and chewing simulator.
[Source: Graph courtesy of Dr. Kazem Alemzadeh]
Statistical analysis revealed little difference in the amount of xylitol collected in the saliva at 5, 10, 15, and 20 minutes of chewing (Figure 8). Overall, the results show that the chewing robot was able to chew gum similarly to the human subjects. “We definitely proved the concept with this robot,” explains Dr. Alemzadeh. “The simulator we created has the ability to chew gum, and this provides the groundwork for developing a robot that could be used to test a medicated chewing gum drug-delivery system.”
There are other uses for the jaw simulator beyond medicated chewing gum. It can also be used to test dental materials, and in food science to test gum breakdown and flavor release. In the next few years, Dr. Alemzadeh plans to test the performance of this humanoid jaw simulator when compared to other robotic chewing devices. He also plans to test the release of currently available medicinal chewing gums such as those containing caffeine and nicotine.
Dr. Kazem Alemzadeh is a Senior Lecturer in the Department of Mechanical Engineering at the University of Bristol, United Kingdom. His work focuses on robotic engineering with a particular interest in developing robotic models of human chewing for dentistry and medicine. When not in the laboratory, Dr. Alemzadeh enjoys spending time outdoors close to nature, walking through the woodland.
Dr. Nicola West is Professor of Restorative Dentistry at the University of Bristol, United Kingdom. Her work focuses on oral health and the links between gum disease and dementia. When not in the clinic or laboratory, Dr. West enjoys gardening and bee keeping.
For More Information:
- Alemzadeh, K., et al. 2020. “Development of a chewing robot with built-in humanoid jaws to simulate mastication to quantify robotic agents release from chewing gums compared to human participants.” IEEE Transactions on Biomedical Engineering. https://research-information.bris.ac.uk/en/publications/development-of-a-chewing-robot-with-built-in-humanoid-jaws-to-sim
- Robot jaw shows effect of medicated chewing gum. 2020. https://tectales.com/bionics-robotics/robot-jaws-shows-effect-of-medicated-chewing-gum.html
- Raabe, D. et al. 2011. “Improved single- and multi-contact life-time testing of dental restorative materials using key characteristics of the human masticatory system and a force/position-controlled robotic dental wear simulator.” Bioinspiration & Biomimetics, 7(1). https://iopscience.iop.org/article/10.1088/1748-3182/7/1/016002
- “The Chewing Robot: a new biologically-inspired way to test dental materials.” 2009. https://royalsociety.org/science-events-and-lectures/2009/summer-science/chewing-robot/
- “Robot to evaluate dental wear and tear.” 2009. British Dental Journal 207(311). https://www.nature.com/articles/sj.bdj.2009.870
- Alemzadeh, K. and D. Raabe. 2008. “Prototyping artificial jaws for the robotic dental testing simulator.” Journal of Engineering in Medicine, 222. https://research-information.bris.ac.uk/en/publications/prototyping-artificial-jaws-for-the-robotic-dental-testing-simula
- Alemzadeh, K. and D. Raabe. 2007. Prototyping artificial jaws for the Bristol Dento-Munch Robo-Simulator. 'A parallel robot to test dental components and materials.” Conference Proceedings of IEEE Engineering in Medicine and Biology Society. https://pubmed.ncbi.nlm.nih.gov/18002240/
To Learn More:
Robotics
- “The Skull, the Spider, and the Aircraft Simulator.” https://www.bristol.ac.uk/news/2008/212017945379.html
- Robotics. https://www.sciencedirect.com/topics/engineering/robotics
- IEEE Robotics and Automation Society. https://www.ieee-ras.org/
Temporomandibular Joint
- American Dental Association. https://www.mouthhealthy.org/en/az-topics/t/tmj
- National Institute of Dental and Craniofacial Research. https://www.nidcr.nih.gov/health-info/tmj
Drug Delivery
- Drug Delivery Systems. https://www.nibib.nih.gov/science-education/science-topics/drug-delivery-systems-getting-drugs-their-targets-controlled-manner
Written by Rebecca Kranz with Andrea Gwosdow, PhD at www.gwosdow.com
HOME | ABOUT | ARCHIVES | TEACHERS | LINKS | CONTACT
All content on this site is © Massachusetts
Society for Medical Research or others. Please read our copyright
statement — it is important. |