| |
Go to any aquarium, or even your local pet store, and youll quickly observe that many fish species travel in packs. Packs of fishor schools, as theyre knownare composed of both leaders and followers, but scientists know very little about what characteristics make good leaders of a fish school. Recent experiments by Dr. Maurizio Porfiri shed new light on fish leadership skills, which could have profound implications for our knowledge of animal behavior as well as animal protection.
Dr. Porfiri, at the Polytechnic Institute of New York University (NYU-Poly), is an engineer by training. He began working with fish because of the tremendous amount of mechanical engineering found in fish anatomy, and because he was interested in the fluid dynamics involved in moving fish through water. His team began by developing a robotic fish that they then tested with live fish in a variety of ways, with support from the National Science Foundation.
In the first set of experiments, Dr. Porfiri used
zebrafish, a common laboratory animal model. Zebrafish are a very social fresh water fish species that socially interact with a wide range of other fish. Zebrafish males and females are also known to be both attracted by females, so the researchers attempted to create a female-looking robot: a bit stockier, more curved, and with a larger belly. This provided hope that the mechanics used to control the fish could be a bit larger.
The researchers developed a basic robot model of the female zebrafish, a yellowish fish with a bright grey background and blue stripes. They then made a variety of robot models to discriminate the preference of zebrafish to color, size and shape. They changed their models in response to fish preferences.
How do you test fish preference?
To test the responsiveness of the zebrafish to a variety of models, the researchers placed the fish in a tank divided into three parts by transparent panels. The live fish were placed in the center and given a choice between two stimuli, one in each side compartment. The scientists then measured how much time the live fish spent at one side of the tank or the other, which served as an indicator of preference. Based on these experiments the researchers found the most attractive-looking robot for zebrafish.

Next, Dr. Porfiri needed to determine how the robotic fish should swim to be most attractive to the live fish. For this series of tests he used golden shiners, which are better swimmers than zebrafish. Dr. Porfiri placed the fish in a channel with an induced water flow, and then placed the robot in the channel as well. If the robot did not beat its tail, the fish did not take notice. Once the robot started beating its tail, however, the fish started paying attention.
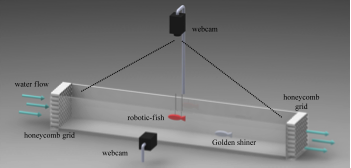
The fish placed themselves in the wake of the robot and moved their bodies to adapt to the water flow, enabling them to expend less energy while moving at a similar speed. The fish engaged the robot because they gained an advantage by swimming in its wake. The researchers determined that the highest attraction for the robot occurred when its tail was beating 2 to 3 times per second.
Recently, the researchers have changed the behavior of the robot based on the fishs initial response, and then observed the fishes reaction to the change. Dr. Porfiri found that by adjusting the frequency of tail flapping, increasing the frequency as the fish got closer, the fish would be more attracted to the robot. Thus, Dr. Porfiri has discovered one mechanism of fish attraction.
This research sheds new light on fish behavior, which could also have profound ecological impacts. For example, in the event of an ecological disaster like an oil spill or a polluted area, robotic fish could be used to lead fish away from the affected site. On the other hand, it might also be possible to repel fish from certain areas using unattractive robotic fish. These experiments are just beginning. In future experiments, Dr. Porfiri plans to explore individual preferences within groups.
Until now, all of Dr. Porfiris experiments have been performed in laboratory conditions. The next major step is to determine how the robotic fish interact with live fish in their natural environments. In this way, the researchers would be able to understand how many robots would be needed for particular schools of fish. They would also be able to work on manipulating multiple robots to swim together and best attract the fish.
My hope is that this research will have important environmental and ecological effects, Dr. Porfiri commented. But there are still many more questions that need answering before then.
Dr. Maurizio Porfiri is an Associate Professor of Mechanical Engineering at the Polytechnic Institute of New York University. His research focuses on modeling complex underwater systems, including his latest work with robotic fish.

Robotic fish inspired by a fertile zebrafish female (fattened aspect ratio,
magnified blue stripes and saturated yellow colors)."
To Learn More:
- Aureli, M. et al. 2010. Free-Locomotion of Underwater Vehicles Actuated by Ionic Polymer Metal Composites. IEEE/ASME Transactions on Mechatronics, 15(4): 603-614.
- Abaid, N. et al. 2012. Zebrafish responds differentially to a robotic fish of varying aspect ratio, tail beat frequency, noise, and color. Behavioral Brain Research, 233: 545-553.
- Marras, S. and M. Porfiri. 2012. Fish and robots swimming together: attraction toward the robot demands biomimetic locomotion. Journal of the Royal Society Interface, 9: 1856-1868.
- Kopman, V. et al. 2013. Closed-loop control of zebrafish response using a bioinpired robotic-fish in a preference test. Journal of the Royal Society Interface, 10: 20120540.
- Polverino et al. 2012. Zebrafish response to robotic fish: preference experiments on isolated individuals and small shoals. Bioinspiration & Biomimetics, 7: 036019.
For More Information:
- http://www.robotic-fish.net/
- http://news.discovery.com/earth/pollution-sniffing-robotic-fish-to-the-rescue-120523.html
Rebecca Kranz with Andrea Gwosdow, PhD www.gwosdow.com
HOME | ABOUT | ARCHIVES | TEACHERS | LINKS | CONTACT
All content on this site is © Massachusetts
Society for Medical Research or others. Please read our copyright
statement — it is important. |
|
|
 Research Group
 Dr. Maurizio Porfiri
Multimedia:
 Robot Fish Follows Porfiri
 Science on NBC News: "With a wag of its tail, robo-fish draws attention of real thing"
 NSF Discovery: Robot Fish Can Trick the Real Thing
Sign Up for our Monthly Announcement!
...or  subscribe to all of our stories! subscribe to all of our stories!

What A Year! is a project of the Massachusetts
Society for Medical Research.
|
|